 |
SPEED
|
|
SPEED
|
Data Types | |
| type | interval |
| type | kdtree2 |
| type | tree_node |
Functions/Subroutines | |
| type(kdtree2) function, pointer, public | kdtree2_create (input_data, dim, sort, rearrange) |
| subroutine, public | kdtree2_destroy (tp) |
| subroutine, public | kdtree2_n_nearest (tp, qv, nn, results) |
| subroutine, public | kdtree2_n_nearest_around_point (tp, idxin, correltime, nn, results) |
| subroutine, public | kdtree2_r_nearest (tp, qv, r2, nfound, nalloc, results) |
| subroutine, public | kdtree2_r_nearest_around_point (tp, idxin, correltime, r2, nfound, nalloc, results) |
| integer function, public | kdtree2_r_count (tp, qv, r2) |
| integer function, public | kdtree2_r_count_around_point (tp, idxin, correltime, r2) |
| subroutine, public | kdtree2_n_nearest_brute_force (tp, qv, nn, results) |
| subroutine, public | kdtree2_r_nearest_brute_force (tp, qv, r2, nfound, results) |
| subroutine, public | kdtree2_sort_results (nfound, results) |
Variables | |
| integer, parameter | bucket_size = 12 |
| type (kdtree2) function, pointer, public kdtree2_module::kdtree2_create | ( | real(kdkind), dimension(:,:), target | input_data, |
| integer, intent(in), optional | dim, | ||
| logical, intent(in), optional | sort, | ||
| logical, intent(in), optional | rearrange | ||
| ) |
Definition at line 611 of file kdtree2.f90.
References bucket_size, and kdtree2_precision_module::kdkind.
Referenced by make_nh_enhanced_nnsearch().

| subroutine, public kdtree2_module::kdtree2_destroy | ( | type (kdtree2), pointer | tp | ) |
Definition at line 988 of file kdtree2.f90.
Referenced by make_nh_enhanced_nnsearch().

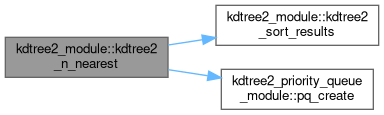
| subroutine, public kdtree2_module::kdtree2_n_nearest | ( | type (kdtree2), pointer | tp, |
| real(kdkind), dimension(:), intent(in), target | qv, | ||
| integer, intent(in) | nn, | ||
| type(kdtree2_result), dimension(:), target | results | ||
| ) |
Definition at line 1030 of file kdtree2.f90.
References kdtree2_sort_results(), and kdtree2_priority_queue_module::pq_create().
Referenced by make_nh_enhanced_nnsearch().

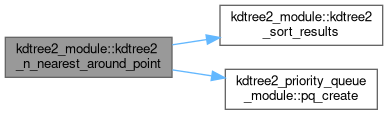
| subroutine, public kdtree2_module::kdtree2_n_nearest_around_point | ( | type (kdtree2), pointer | tp, |
| integer, intent(in) | idxin, | ||
| integer, intent(in) | correltime, | ||
| integer, intent(in) | nn, | ||
| type(kdtree2_result), dimension(:), target | results | ||
| ) |
Definition at line 1073 of file kdtree2.f90.
References kdtree2_sort_results(), and kdtree2_priority_queue_module::pq_create().
| subroutine, public kdtree2_module::kdtree2_n_nearest_brute_force | ( | type (kdtree2), pointer | tp, |
| real(kdkind), dimension(:), intent(in) | qv, | ||
| integer, intent(in) | nn, | ||
| type(kdtree2_result), dimension(:) | results | ||
| ) |
Definition at line 1694 of file kdtree2.f90.
| integer function, public kdtree2_module::kdtree2_r_count | ( | type (kdtree2), pointer | tp, |
| real(kdkind), dimension(:), intent(in), target | qv, | ||
| real(kdkind), intent(in) | r2 | ||
| ) |
Definition at line 1244 of file kdtree2.f90.
| integer function, public kdtree2_module::kdtree2_r_count_around_point | ( | type (kdtree2), pointer | tp, |
| integer, intent(in) | idxin, | ||
| integer, intent(in) | correltime, | ||
| real(kdkind), intent(in) | r2 | ||
| ) |
Definition at line 1288 of file kdtree2.f90.
| subroutine, public kdtree2_module::kdtree2_r_nearest | ( | type (kdtree2), pointer | tp, |
| real(kdkind), dimension(:), intent(in), target | qv, | ||
| real(kdkind), intent(in) | r2, | ||
| integer, intent(out) | nfound, | ||
| integer, intent(in) | nalloc, | ||
| type(kdtree2_result), dimension(:), target | results | ||
| ) |
Definition at line 1116 of file kdtree2.f90.
References kdtree2_sort_results().

| subroutine, public kdtree2_module::kdtree2_r_nearest_around_point | ( | type (kdtree2), pointer | tp, |
| integer, intent(in) | idxin, | ||
| integer, intent(in) | correltime, | ||
| real(kdkind), intent(in) | r2, | ||
| integer, intent(out) | nfound, | ||
| integer, intent(in) | nalloc, | ||
| type(kdtree2_result), dimension(:), target | results | ||
| ) |
Definition at line 1177 of file kdtree2.f90.
References kdtree2_sort_results().

| subroutine, public kdtree2_module::kdtree2_r_nearest_brute_force | ( | type (kdtree2), pointer | tp, |
| real(kdkind), dimension(:), intent(in) | qv, | ||
| real(kdkind), intent(in) | r2, | ||
| integer, intent(out) | nfound, | ||
| type(kdtree2_result), dimension(:) | results | ||
| ) |
Definition at line 1734 of file kdtree2.f90.
References kdtree2_sort_results().

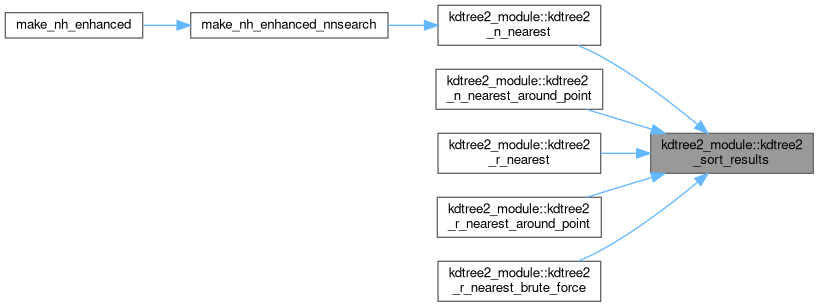
| subroutine, public kdtree2_module::kdtree2_sort_results | ( | integer, intent(in) | nfound, |
| type(kdtree2_result), dimension(:), target | results | ||
| ) |
Definition at line 1773 of file kdtree2.f90.
Referenced by kdtree2_n_nearest(), kdtree2_n_nearest_around_point(), kdtree2_r_nearest(), kdtree2_r_nearest_around_point(), and kdtree2_r_nearest_brute_force().
| integer, parameter kdtree2_module::bucket_size = 12 |
Definition at line 519 of file kdtree2.f90.
Referenced by kdtree2_create().